Hello everyone,
I am in the process of building a laptimer for racetrack (for my friends and I) and I am really interested in (raw) Lora to share data (sector + laptimes + messages) between a laptimer and a base unit.
Context
I would like to use Lora to :
- transmit the sector time and laptime from each of my laptimers (node) to a base station
- transmit messages from my base station to the laptimers (node)
- in a future version, maybe transmit additional informations (GPS, sensor reading)
Update frequency will be around 1 measure each 10 to 60sec, depending on the racetrack.
And required range is going to be arround 1km (not 5km) for most of the track.
Questions
- First things first
 , is (raw)Lora suited for my (future) application ? Or is there better alternative ?
, is (raw)Lora suited for my (future) application ? Or is there better alternative ?
- Is it possible to use Lora with a hidden/internal antenna (typically inside a case for the laptimer). I do not want to have an external antenna on the laptimer itself. The base could have antenna though.
- What range is doable with such hidden/internal antenna?
- Is it possible to make an antenna directly on the PCB?
- Which hardware is suggested for my application (on laptimer) ?
- Will a Raspberry Pi will work as a base station?
- What update frequency could I reach with Lora? In the first prototype, I only need the data each 10 to 60sec, but is it possible to refresh the data more often (1-2 second for a GPS position for example) ? or is it already too much?
- Which frequency should I target ? 433Mhz or 863-870Mhz (I am in Europe)
- Power consumption is ok ?
Thanks a lot if you have answers, it would really help me to have a better overview of what I can do or not  !
!
PS: don’t hesitate to ask me other details if needed
My guess is that this (mostly LoRaWAN) forum is not the right place for all off your questions.
LoRa is a spread-spectrum modulation technique which allows sending data at extremely low data-rates to extremely long ranges.
So if you are plannning to transmit engine data from multiple cars realtime … and bi drectional, better look for an altenative imho.
Hi Borroz and thanks for your reply 
It is only a hobby project, so I don’t intend to send a lot of data, etc…
I am not planning to send much more than laptimes (coded in milliseconds or 10x milliseconds, that would be on 16bits). This would already be great.
In a second part, message exchange from the base could also be simplified (index of standard messages instead of custom text).
Could you point me where I could have more chances of finding answers?
Most of the questions also applies to LoraWan (antenna design and performance, hardware might also be the same).
how many users at the same time ?
Most of the cases 1 to 5 users, big maximum 20 (will probably never be reached ^^).
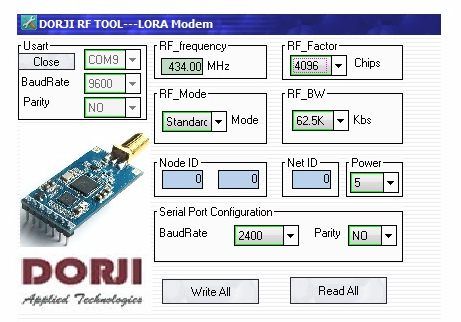
a few years ago I used some of these radio modem modules from dorji
http://www.dorji.com/products-detail.php?ProId=34
You can set one as the base and other ones a 'mobile nodes in the cars
all nodes can communicate to the base, the base can communicate to all nodes but the nodes cannot communicate to each other.
you set them with a little tool like this :
for laptimes only maybe this is a solution:
’ I do not want to have an external antenna ’ and ’ required range is going to be arround 5km ’
that will be a problem imho 
Thanks for the links !
I am exactly looking this kind of functionnality (only node to/from base, no node to node communication)
I don’t want to use 2.4Ghz as the laptimer from your link is intended for RC cars, where the track is quite small.
For real racetrack or karting track, range will be too short.
I saw this link, where they reached 9km using only PCB antenna (https://eth0maz.wordpress.com/2016/12/05/lorawan-node-with-onboard-antenna/).
The problem with external antenna is that they are not robust (specially on our motorcycles). That’s why I intended to use either PCB antenna or something that will stays inside the laptimer.
And concerning the update rate on a private gateway? What range could I expect? Data received each 100ms / 1sec / 10sec ?
PS: I just checked on my common racetrack in France, and I have a maximum distance from 1km between the pits and the farthest point on racetrack. So definetely not 5 km !
and off course you need more electronics on both sides ( the base and all the cars/motors)
these radiomodems do nothing if you don’t switch the transmitter on and feed it some bytes, so an arduino will do… but then… 5v or 3v3 external battery ect ect. 
also from base to node you need some sort of display
for an radiomodem antenna there are little ‘rubber ducks’ only a few cm long
Exactly, I just asked the question regarding the communication part as the other part is easier for me !
I plan to have a display on the laptimer (so the pilot can see its laptime) and make it run on a battery (2x AA for example). Hence the question about power consumption as well.
And for the base, it will just display the data as a wifi Accesspoint, without display or anything else, this is why I wanted to go with a RPi or maybe ESP32.
I saw the rubber ducks. which could work, but I would like to want a device without external antenna (to be more robust). Are there no tests/reviews from internal antenna?
And concerning the latency of the network (how fast the data could be sent), what can I expect?
Thanks again for the inputs, it really helps
I suggest you think it a bit over yourself first… use some google and read some more about this network before designing a system.or asking other users to design it for you.
start with clear specs like
- distance
- users
- datarate
- data size
ect.
if not this type of questions ends mostly nowhere.