Hello,
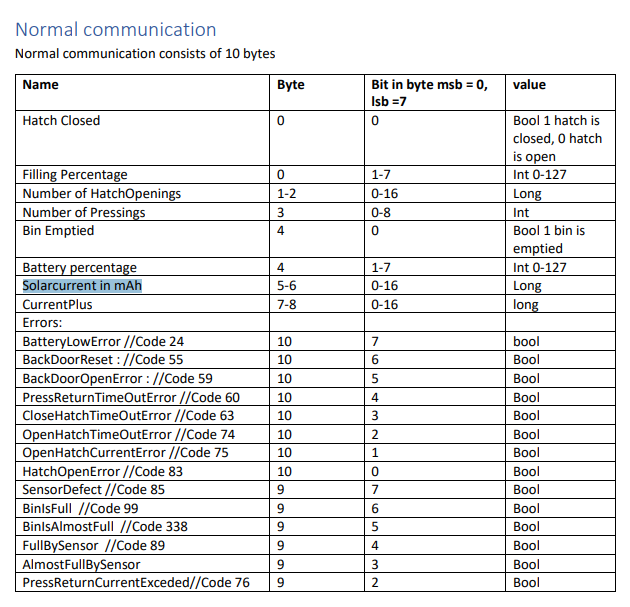
I have created a decoder for the Mr. Fill Smart Bins. This is my first time creating a decoder and would like to check if it is correct / makes sense. This is the decoder below and also the documentation to go with it.
This is an example payload:
“frm_payload”: “5BLxIuQDzwAXAEI=”
Thank you.
function decodeUplink(input) {
//Normal Communication
if(input.bytes.length == 11)
{
//Byte 0
var HatchClosed = (input.bytes[0] & 0x80) > 0; //1 = closed
var FillingPercentage = input.bytes[0] & 0x7F; //1-127
//Byte 1 a 2
var NumberOfHatchOpenings = (input.bytes[1] << 8) + input.bytes[2];
//Byte 3
var NumberOfPressings = input.bytes[3];
//Byte 4
var BinEmptied = (input.bytes[4] & 0x80) > 0;//1 = emptied
var BatteryPercentage = input.bytes[4] & 0x7F; //1-127
//Byte 5 a 6
var SolarcurrentInmAh = (input.bytes[5] << 8) + input.bytes[6];
//Byte 7 a 8
var CurrentPlus = (input.bytes[7] << 8) + input.bytes[8];
//Byte 9
var SensorDefect = (input.bytes[9] & 0x01) > 0;
var BinIsFull = (input.bytes[9] & 0x02) > 0;
var BinIsAlmostFull = (input.bytes[9] & 0x04) > 0;
var FullBySensor = (input.bytes[9] & 0x08) > 0;
var AlmostFullBySensor = (input.bytes[9] & 0x10) > 0;
var PressReturnCurrentExceded = (input.bytes[9] & 0x20) > 0;
//Byte 10
var BatteryLowError = (input.bytes[10] & 0x01) > 0;
var BackDoorReset = (input.bytes[10] & 0x02) > 0;
var BackDoorOpenError = (input.bytes[10] & 0x04) > 0;
var PressReturnTimeOutError = (input.bytes[10] & 0x08) > 0;
var CloseHatchTimeOutError = (input.bytes[10] & 0x10) > 0;
var OpenHatchTimeOutError = (input.bytes[10] & 0x20) > 0;
var OpenHatchCurrentError = (input.bytes[10] & 0x40) > 0;
var HatchOpenError = (input.bytes[10] & 0x80) > 0;
return {
data: {
HatchClosed: HatchClosed,
FillingPercentage: FillingPercentage,
NumberOfHatchOpenings: NumberOfHatchOpenings,
NumberOfPressings: NumberOfPressings,
BinEmptied: BinEmptied,
BatteryPercentage: BatteryPercentage,
SolarcurrentInmAh: SolarcurrentInmAh,
CurrentPlus: CurrentPlus,
//Byte 9
SensorDefect: SensorDefect,
BinIsFull: BinIsFull,
BinIsAlmostFull: BinIsAlmostFull,
FullBySensor: FullBySensor,
AlmostFullBySensor: AlmostFullBySensor,
PressReturnCurrentExceded: PressReturnCurrentExceded,
//Byte 10
BatteryLowError: BatteryLowError,
BackDoorReset: BackDoorReset,
BackDoorOpenError: BackDoorOpenError,
PressReturnTimeOutError: PressReturnTimeOutError,
CloseHatchTimeOutError: CloseHatchTimeOutError,
OpenHatchTimeOutError: OpenHatchTimeOutError,
OpenHatchCurrentError: OpenHatchCurrentError,
HatchOpenError: HatchOpenError
},
warnings: [],
errors: []
};
}
else {
return {
errors: ["Error - Wrong Number of Bytes"]
};
}
}