I am trying to connect my Lora/GPS shield and Arduino to TTN v3.
I can see the gateway is connected. but the end device is not showing up on things network.
is it that v3 no longer support Lora/GPS shield ?/
#include <lmic.h>
#include <hal/hal.h>
#include <SPI.h>
#include <SoftwareSerial.h>
#include <TinyGPS.h>
TinyGPS gps;
SoftwareSerial ss(3,4); // Arduino RX, TX to conenct to GPS module.
static void smartdelay(unsigned long ms);
unsigned int count = 1; //For times count
String datastring1="";
String datastring2="";
String datastring3="";
uint8_t datasend[20]; //Used to store GPS data for uploading
char gps_lon[20]={"\0"}; //Storage GPS info
char gps_lat[20]={"\0"}; //Storage latitude
char gps_alt[20]={"\0"}; //Storage altitude
float flat, flon,falt;
static uint8_t mydata[] = "Hello, world!"; //For test using.
static const PROGMEM u1_t NWKSKEY[16] = { 0x62, 0xF3, 0xEE, 0x5B, 0xA9, 0x87, 0xC3, 0x4B, 0x28, 0x62, 0x0A, 0xCB, 0xE9, 0x4E, 0xE4, 0x97 };
static const u1_t PROGMEM APPSKEY[16] = { 0x45, 0x42, 0x61, 0x5A, 0x2B, 0xBC, 0x09, 0x49, 0x3C, 0x16, 0xFF, 0xE6, 0xD1, 0x2C, 0xF1, 0x7F };
static const u4_t DEVADDR = 0x260D7B9C;
/* These callbacks are only used in over-the-air activation, so they are
left empty here (we cannot leave them out completely unless
DISABLE_JOIN is set in config.h, otherwise the linker will complain).*/
void os_getArtEui (u1_t* buf) { }
void os_getDevEui (u1_t* buf) { }
void os_getDevKey (u1_t* buf) { }
static osjob_t initjob,sendjob,blinkjob;
/* Schedule TX every this many seconds (might become longer due to duty
cycle limitations).*/
const unsigned TX_INTERVAL = 30;
// Pin mapping
const lmic_pinmap lmic_pins = {
.nss = 10,
.rxtx = LMIC_UNUSED_PIN,
.rst = 9,
.dio = {2, 6, 7},
};
void do_send(osjob_t* j){
// Check if there is not a current TX/RX job running
if (LMIC.opmode & OP_TXRXPEND) {
Serial.println("OP_TXRXPEND, not sending");
} else {
GPSRead();
GPSWrite();
// Prepare upstream data transmission at the next possible time.
LMIC_setTxData2(1,datasend,sizeof(datasend)-1,0);
//LMIC_setTxData2(1, mydata, sizeof(mydata)-1, 0);
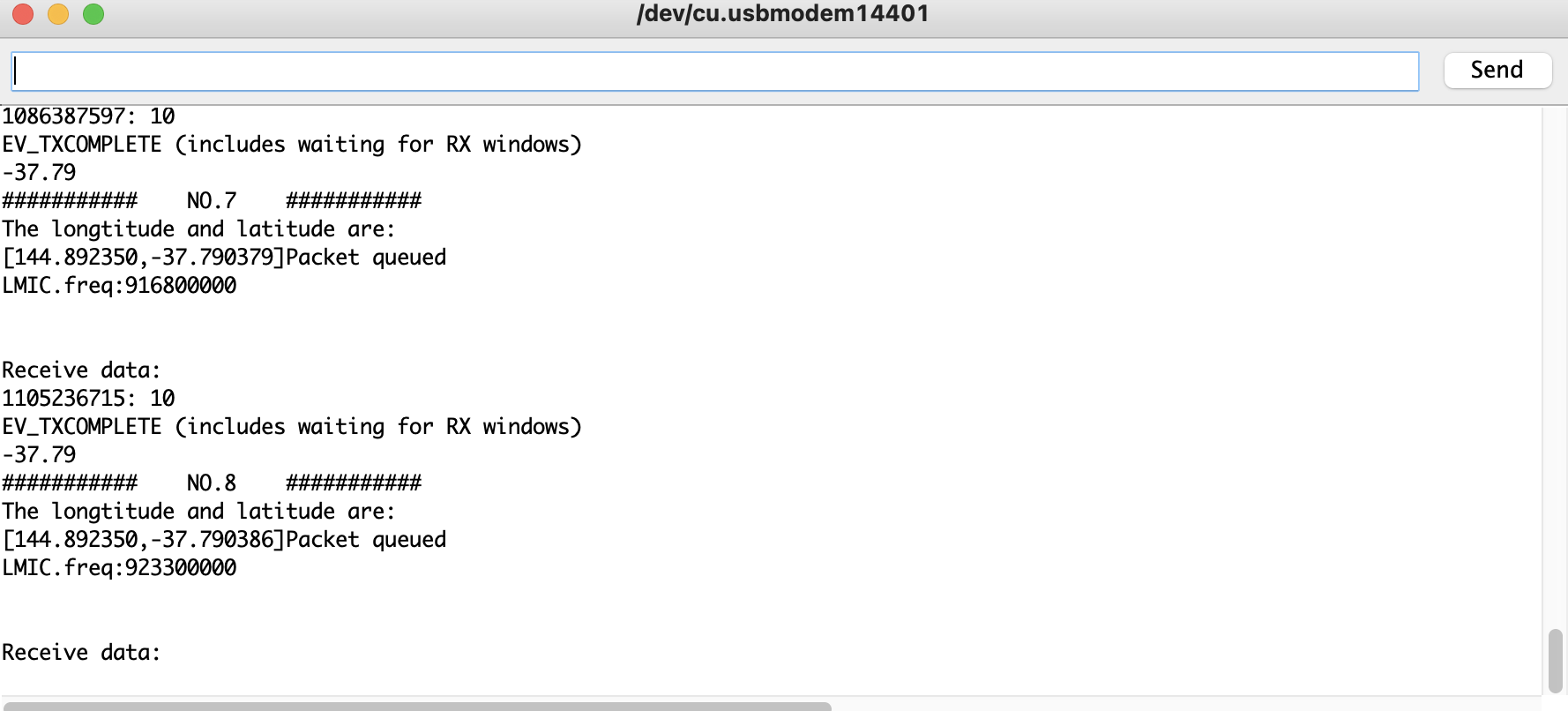
Serial.println("Packet queued");
Serial.print("LMIC.freq:");
Serial.println(LMIC.freq);
Serial.println("");
Serial.println("");
Serial.println("Receive data:");
}
// Next TX is scheduled after TX_COMPLETE event.
}
void onEvent (ev_t ev) {
Serial.print(os_getTime());
Serial.print(": ");
Serial.println(ev);
switch(ev) {
case EV_SCAN_TIMEOUT:
Serial.println("EV_SCAN_TIMEOUT");
break;
case EV_BEACON_FOUND:
Serial.println("EV_BEACON_FOUND");
break;
case EV_BEACON_MISSED:
Serial.println("EV_BEACON_MISSED");
break;
case EV_BEACON_TRACKED:
Serial.println("EV_BEACON_TRACKED");
break;
case EV_JOINING:
Serial.println("EV_JOINING");
break;
case EV_JOINED:
Serial.println("EV_JOINED");
break;
case EV_RFU1:
Serial.println("EV_RFU1");
break;
case EV_JOIN_FAILED:
Serial.println("EV_JOIN_FAILED");
break;
case EV_REJOIN_FAILED:
Serial.println("EV_REJOIN_FAILED");
break;
case EV_TXCOMPLETE:
Serial.println("EV_TXCOMPLETE (includes waiting for RX windows)");
if(LMIC.dataLen) {
// data received in rx slot after tx
Serial.print("Data Received: ");
Serial.write(LMIC.frame+LMIC.dataBeg, LMIC.dataLen);
Serial.println();
}
// Schedule next transmission
os_setTimedCallback(&sendjob, os_getTime()+sec2osticks(TX_INTERVAL), do_send);
break;
case EV_LOST_TSYNC:
Serial.println("EV_LOST_TSYNC");
break;
case EV_RESET:
Serial.println("EV_RESET");
break;
case EV_RXCOMPLETE:
// data received in ping slot
Serial.println("EV_RXCOMPLETE");
break;
case EV_LINK_DEAD:
Serial.println("EV_LINK_DEAD");
break;
case EV_LINK_ALIVE:
Serial.println("EV_LINK_ALIVE");
break;
default:
Serial.println("Unknown event");
break;
}
}
void setup() {
// initialize digital pin as an output.
Serial.begin(9600);
ss.begin(9600);
while(!Serial);
Serial.println("LoRa GPS Example---- ");
Serial.println("Connect to TTN");
#ifdef VCC_ENABLE
// For Pinoccio Scout boards
pinMode(VCC_ENABLE, OUTPUT);
digitalWrite(VCC_ENABLE, HIGH);
delay(1000);
#endif
// LMIC init
os_init();
// Reset the MAC state. Session and pending data transfers will be discarded.
LMIC_reset();
/*LMIC_setClockError(MAX_CLOCK_ERROR * 1/100);
Set static session parameters. Instead of dynamically establishing a session
by joining the network, precomputed session parameters are be provided.*/
#ifdef PROGMEM
/* On AVR, these values are stored in flash and only copied to RAM
once. Copy them to a temporary buffer here, LMIC_setSession will
copy them into a buffer of its own again.*/
uint8_t appskey[sizeof(APPSKEY)];
uint8_t nwkskey[sizeof(NWKSKEY)];
memcpy_P(appskey, APPSKEY, sizeof(APPSKEY));
memcpy_P(nwkskey, NWKSKEY, sizeof(NWKSKEY));
LMIC_setSession (0x1, DEVADDR, nwkskey, appskey);
#else
// If not running an AVR with PROGMEM, just use the arrays directly
LMIC_setSession (0x1, DEVADDR, NWKSKEY, APPSKEY);
#endif
for (int channel=0; channel<8; ++channel) {
LMIC_disableChannel(channel);
}
for (int channel=9; channel<72; ++channel) {
LMIC_disableChannel(channel);
}
// Disable link check validation
LMIC_setLinkCheckMode(0);
// TTN uses SF9 for its RX2 window.
LMIC.dn2Dr = DR_SF9;
// Set data rate and transmit power (note: txpow seems to be ignored by the library)
LMIC_setDrTxpow(DR_SF7,14);
// Start job
do_send(&sendjob);
}
void GPSRead()
{
unsigned long age;
gps.f_get_position(&flat, &flon, &age);
falt=gps.f_altitude(); //get altitude
flon == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flon, 6;//save six decimal places
flat == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flat, 6;
// falt == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : falt, 2;
Serial.println(flat);
}
void GPSWrite()
{
/*Convert GPS data to format*/
datastring1 +=dtostrf(flat, 0, 6, gps_lat);
datastring2 +=dtostrf(flon, 0, 6, gps_lon);
datastring3 +=dtostrf(falt, 0, 2, gps_alt);
if(flon!=1000.000000)
{
strcat(gps_lon,",");
strcat(gps_lon,gps_lat);
//strcat(gps_lon,",");
//strcat(gps_lon,gps_alt);
strcpy((char*)datasend,gps_lon); //the format of datasend is longtitude,latitude,altitude
Serial.print("########### ");
Serial.print("NO.");
Serial.print(count);
Serial.println(" ###########");
Serial.println("The longtitude and latitude are:");
Serial.print("[");
Serial.print((char*)datasend);
Serial.print("]");
Serial.print("");
/*
for(int k = 0; k < 20;k++)
{
Serial.print("[");
Serial.print(datasend[k], HEX);
Serial.print("]");
}
Serial.println("");
Serial.println("");*/
count++;
}
int32_t lng = flat * 10000;
int32_t lat = flon * 10000;
datasend[0] = lat;
datasend[1] = lat >> 8;
datasend[2] = lat >> 16;
datasend[3] = lng;
datasend[4] = lng >> 8;
datasend[5] = lng >> 16;
smartdelay(1000);
//Serial.println(gps_lat);
//Serial.println(gps_lon);
}
static void smartdelay(unsigned long ms)
{
unsigned long start = millis();
do
{
while (ss.available())
{
gps.encode(ss.read());
}
} while (millis() - start < ms);
}
void loop() {
os_runloop_once();
}