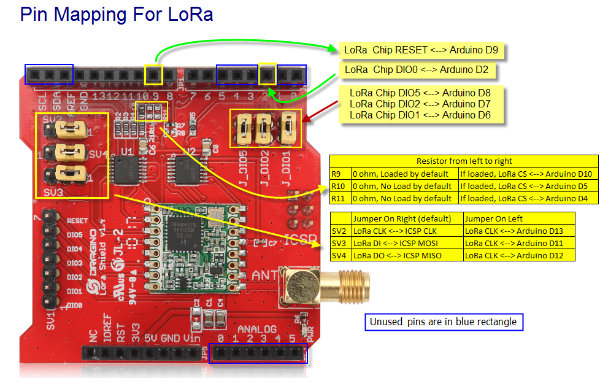
Using an Arduino Uno with a Dragino Uno LoRa shield I discover serious problems sending data coming from a Nova SDS011 dust sensor to TTN. The pins D3, D4 and D5 are not used by the shield (see attachment) so I use pins D3 and D4 for Tx and Rx of the dust sensor. The sensor values are displayed in the serial monitor as long as I disable the os_init and LMIC_reset lines (line 62 and 63 marked ***) in the sketch. I have to disable them both, disabling only one of them makes no difference. Enabling these lines stops the complete (all!) output to the serial monitor and then there is also no data sent to my TTN gateway.
I have tested the TTN part, without using the SDS011 part, and this part looks okay so the code for TTN is not the problem. It turned out there is a conflict between the SDS011 and the LMIC library. Can someone be so kind to look what went wrong?
#include “SdsDustSensor.h”
#include <lmic.h>
#include <hal/hal.h>
#include <SPI.h>
SdsDustSensor sds(3, 4); // SDS011 Tx Rx
int minutesDelay = 1;
int pm10;
int pm25;
static const PROGMEM u1_t NWKSKEY[16] = { 0xXX, 0xXX, 0xXX, 0xXX, 0xXX, 0xXX, 0xXX, 0xXX, 0xXX, 0xXX, 0xXX, 0xXX, 0xXX, 0xXX, 0xXX, 0xXX }; // TTN Network session key
static const u1_t PROGMEM APPSKEY[16] = { 0xXX, 0xXX, 0xXX, 0xXX, 0xXX, 0xXX, 0xXX, 0xXX, 0xXX, 0xXX, 0xXX, 0xXX, 0xXX, 0xXX, 0xXX, 0xXX }; // TTN Application session key
static const u4_t DEVADDR = 0xXXXXXXXX; // TTN End-device address
void os_getArtEui (u1_t* buf) { }
void os_getDevEui (u1_t* buf) { }
void os_getDevKey (u1_t* buf) { }
static osjob_t sendjob;
// Pinmapping Dragino Uno Shield
const lmic_pinmap lmic_pins = {
.nss = 10,
.rxtx = LMIC_UNUSED_PIN,
.rst = 9,
.dio = {2, 6, 7},
};
void onEvent (ev_t ev) {
switch(ev) {
case EV_TXCOMPLETE:
break;
}
}
void do_send(osjob_t* j){
static uint8_t message[4];
message[0] = highByte(pm10);
message[1] = lowByte(pm10);
message[2] = highByte(pm25);
message[3] = lowByte(pm25);
if (LMIC.opmode & OP_TXRXPEND) {
Serial.println(“Nothing sent (OP_TXRXPEND)”);
} else {
LMIC_setTxData2(1, message, sizeof(message), 0);
Serial.print(“Sent: (”);
Serial.print(pm10);
Serial.print("/");
Serial.print(pm25);
Serial.println(")");
}
}
void setup() {
Serial.begin(9600);
Serial.println(“Dust sensor”);
sds.begin();
Serial.println(sds.queryFirmwareVersion().toString()); // prints firmware version
Serial.println(sds.setActiveReportingMode().toString()); // ensures sensor is in ‘active’ reporting mode
Serial.println(sds.setCustomWorkingPeriod(minutesDelay).toString()); // sensor sends data every x minutes
// os_init(); // ***** Error when unmarked *****
// LMIC_reset(); // ***** Error when unmarked *****
uint8_t appskey[sizeof(APPSKEY)];
uint8_t nwkskey[sizeof(NWKSKEY)];
memcpy_P(appskey, APPSKEY, sizeof(APPSKEY));
memcpy_P(nwkskey, NWKSKEY, sizeof(NWKSKEY));
}
void loop() {
PmResult pm = sds.readPm();
if (pm.isOk()) {
Serial.print("PM2.5 = “);
Serial.print(pm.pm25);
Serial.print(”, PM10 = ");
Serial.println(pm.pm10);
} else {
// Do nothing
}
delay(5000);
}