Hi guys,
I’ve finally made the LMIC (V.4.4.1) library work on my arduino pro mini 3.3V (made some posts 1 month ago : SX127X not accepted in TTN for the first 10 minutes - #9 by shutdownsystem), Mainly with the help of this project : GitHub - JackGruber/Arduino-Pro-Mini-LoRa-Sensor-Node: Arduino Pro Mini TTN LoRaWAN Node with RFM95 module battery-powered.
This project needed VScode and plateform.io, and as I want to use it for beginners, I did the migration to Arduino IDE, using this library as a bridge.
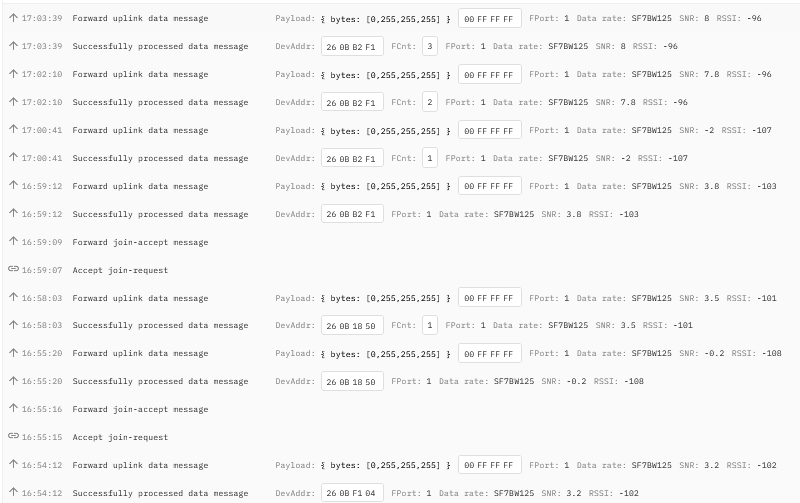
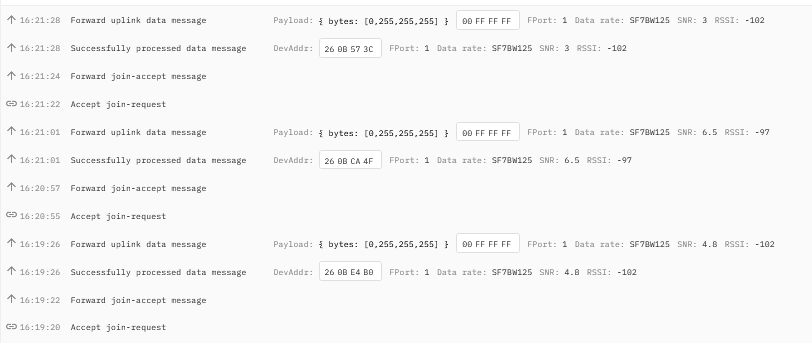
It works pretty good, and when I insert the Low Power part (using avr/sleep.h), I go to 0.1mA which is good enough for me. But when I insert it, it also looks like my Arduino restart from the beginning (doing the setup, etc). Here is an exemple of the TTN Console, my serial monitor and my code.
Do I miss something ? Why it’s joining everytime before sending the message ? (And also why it doesn’t care of the sleep interval of 2min ?)
(note that with the github project above, there is no problem…)
Thank you,
LMIC: 4.1.1.0
LoRaWAN_Setup ...
Packet queued
Starting
190425: EV_JOINING
568163: EV_TXSTART
889298: EV_JOINED
netid: 19
devaddr: 260B7FE3
artKey: 976D5CFEDD09EBC2E16B2CF6298B137
nwkKey: 3B8A8A75756D7854C303B75DCB5A2B8
890671: EV_TXSTART
1272380: EV_TXCOMPLETE
PowerDown...
MCUSR:
LMIC: 4.1.1.0
LoRaWAN_Setup ...
Packet queued
Starting
190511: EV_JOINING
441793: EV_TXSTART
762930: EV_JOINED
netid: 19
devaddr: 260B8D8A
artKey: 187E8C10F73FAF767227C7CB8B3D2F1
nwkKey: C1D4B3AC27149DCB5FC9D04BB6CC5985
764309: EV_TXSTART
1146021: EV_TXCOMPLETE
PowerDown...
MCUSR:
LMIC: 4.1.1.0
LoRaWAN_Setup ...
Packet queued
Starting
190400: EV_JOINING
336732: EV_TXSTART
657868: EV_JOINED
netid: 19
devaddr: 260BE4B0
artKey: 15FE63504CA0D4407C8C59ABCFAF5E4
nwkKey: 6F461A78C59407D7BDCDDF4484CAE
659227: EV_TXSTART
1040936: EV_TXCOMPLETE
PowerDown...
MCUSR:
LMIC: 4.1.1.0
LoRaWAN_Setup ...
Packet queued
Starting
190593: EV_JOINING
351708: EV_TXSTART
745527: EV_JOIN_TXCOMPLETE: no JoinAccept
#include <lmic.h>
#include <hal/hal.h>
#include <SPI.h>
#include <avr/sleep.h>
#define TTN_APPEUI { 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00 } // TTN Application EUI with "lsb"
#define TTN_DEVEUI { } // Hided for the forum
#define TTN_APPKEY { } // Hided for the forum
static const u1_t PROGMEM APPEUI[8]=TTN_APPEUI;
void os_getArtEui (u1_t* buf) { memcpy_P(buf, APPEUI, 8);}
static const u1_t PROGMEM DEVEUI[8]=TTN_DEVEUI;
void os_getDevEui (u1_t* buf) { memcpy_P(buf, DEVEUI, 8);}
static const u1_t PROGMEM APPKEY[16] = TTN_APPKEY;
void os_getDevKey (u1_t* buf) { memcpy_P(buf, APPKEY, 16);}
static uint8_t LORA_DATA[4];
static osjob_t sendjob;
// Schedule TX every this many seconds (might become longer due to duty
// cycle limitations).
const unsigned TX_INTERVAL = 120;
// PIN definition for module
#define PIN_LMIC_NSS 10
#define PIN_LMIC_RST A0
#define PIN_LMIC_DIO0 5
#define PIN_LMIC_DIO1 6
#define PIN_LMIC_DIO2 7
volatile int POWER_DOWN_SLEEP_COUNTER = 0;
bool GO_DEEP_SLEEP = false;
// Pin mapping
const lmic_pinmap lmic_pins = {
.nss = PIN_LMIC_NSS,
.rxtx = LMIC_UNUSED_PIN,
.rst = PIN_LMIC_RST,
.dio = {PIN_LMIC_DIO0, PIN_LMIC_DIO1, PIN_LMIC_DIO2},
};
void printHex2(unsigned v) {
v &= 0xff;
if (v < 16)
Serial.print('0');
Serial.print(v, HEX);
}
void onEvent(ev_t ev)
{
Serial.print(os_getTime());
Serial.print(": ");
switch (ev)
{
case EV_SCAN_TIMEOUT:
Serial.println(F("EV_SCAN_TIMEOUT"));
break;
case EV_BEACON_FOUND:
Serial.println(F("EV_BEACON_FOUND"));
break;
case EV_BEACON_MISSED:
Serial.println(F("EV_BEACON_MISSED"));
break;
case EV_BEACON_TRACKED:
Serial.println(F("EV_BEACON_TRACKED"));
break;
case EV_JOINING:
Serial.println(F("EV_JOINING"));
break;
case EV_JOINED:
Serial.println(F("EV_JOINED"));
#ifndef DISABLE_JOIN
{
u4_t netid = 0;
devaddr_t devaddr = 0;
u1_t nwkKey[16];
u1_t artKey[16];
LMIC_getSessionKeys(&netid, &devaddr, nwkKey, artKey);
Serial.print("netid: ");
Serial.println(netid, DEC);
Serial.print("devaddr: ");
Serial.println(devaddr, HEX);
Serial.print("artKey: ");
for (size_t i = 0; i < sizeof(artKey); ++i)
{
Serial.print(artKey[i], HEX);
}
Serial.println("");
Serial.print("nwkKey: ");
for (size_t i = 0; i < sizeof(nwkKey); ++i)
{
Serial.print(nwkKey[i], HEX);
}
Serial.println("");
}
// Disable link check validation (automatically enabled
// during join, but because slow data rates change max TX
// size, we don't use it in this example.
LMIC_setLinkCheckMode(0);
#endif
break;
/*
|| This event is defined but not used in the code. No
|| point in wasting codespace on it.
||
|| case EV_SCAN_FOUND:
|| Serial.println(F("EV_SCAN_FOUND"));
|| break;
*/
case EV_JOIN_FAILED:
Serial.println(F("EV_JOIN_FAILED"));
break;
case EV_REJOIN_FAILED:
Serial.println(F("EV_REJOIN_FAILED"));
break;
case EV_TXCOMPLETE:
Serial.println(F("EV_TXCOMPLETE"));
if (LMIC.txrxFlags & TXRX_ACK)
{
Serial.println(F("Received ack"));
}
if (LMIC.dataLen)
{
Serial.print(LMIC.dataLen);
Serial.println(F(" bytes of payload"));
}
// Schedule next transmission
os_setTimedCallback(&sendjob, os_getTime() + sec2osticks(TX_INTERVAL), LoRaWANDo_send);
GO_DEEP_SLEEP = true;
break;
case EV_LOST_TSYNC:
Serial.println(F("EV_LOST_TSYNC"));
break;
case EV_RESET:
Serial.println(F("EV_RESET"));
break;
case EV_RXCOMPLETE:
// data received in ping slot
Serial.println(F("EV_RXCOMPLETE"));
break;
case EV_LINK_DEAD:
Serial.println(F("EV_LINK_DEAD"));
break;
case EV_LINK_ALIVE:
Serial.println(F("EV_LINK_ALIVE"));
break;
/* This event is defined but not used in the code.
case EV_SCAN_FOUND:
DisplayPrintln(F("EV_SCAN_FOUND"), LORAWAN_STATE_DISPLAY_LINE);
break;
*/
case EV_TXSTART:
Serial.println(F("EV_TXSTART"));
break;
case EV_TXCANCELED:
Serial.println(F("EV_TXCANCELED"));
break;
case EV_RXSTART:
/* do not print anything -- it wrecks timing */
break;
case EV_JOIN_TXCOMPLETE:
Serial.println(F("EV_JOIN_TXCOMPLETE: no JoinAccept"));
break;
default:
Serial.print(F("Unknown event: "));
Serial.println((unsigned)ev);
break;
}
}
void do_send(osjob_t* j){
// Check if there is not a current TX/RX job running
if (LMIC.opmode & OP_TXRXPEND) {
Serial.println(F("OP_TXRXPEND, not sending"));
} else {
// Prepare upstream data transmission at the next possible time.
LMIC_setTxData2(1, LORA_DATA, sizeof(LORA_DATA)-1, 0);
Serial.println(F("Packet queued"));
}
// Next TX is scheduled after TX_COMPLETE event.
}
void setup() {
Serial.begin(115200);
PrintResetReason();
LoRaWANVersion();
delay(3000);
PowerDownSetupWatchdog();
LoRaWANSetup();
Serial.println(F("Starting"));
LoRaWANDo_send(&sendjob);
}
void loop() {
LoRaWANDo();
}
void PrintResetReason()
{
uint8_t mcusr_copy = MCUSR;
MCUSR = 0;
Serial.print("MCUSR:");
if(mcusr_copy & (1<<WDRF)) Serial.print(" WDRF");
if(mcusr_copy & (1<<BORF)) Serial.print(" BORF");
if(mcusr_copy & (1<<EXTRF)) Serial.print(" EXTRF");
if(mcusr_copy & (1<<PORF)) Serial.print(" PORF");
Serial.println();
}
void LoRaWANVersion()
{
Serial.print(F("LMIC: "));
Serial.print(ARDUINO_LMIC_VERSION_GET_MAJOR(ARDUINO_LMIC_VERSION));
Serial.print(F("."));
Serial.print(ARDUINO_LMIC_VERSION_GET_MINOR(ARDUINO_LMIC_VERSION));
Serial.print(F("."));
Serial.print(ARDUINO_LMIC_VERSION_GET_PATCH(ARDUINO_LMIC_VERSION));
Serial.print(F("."));
Serial.println(ARDUINO_LMIC_VERSION_GET_LOCAL(ARDUINO_LMIC_VERSION));
}
void PowerDownSetupWatchdog()
{
cli(); // Disable global interrupts
MCUSR &= ~(1<<WDRF); // Clear WDRF: Watchdog Reset Flag
WDTCSR |= (1<<WDCE) | (1<<WDE); // WDCE: Watchdog Change Enable, WDE: Watchdog System Reset Enable
// Watchdog Timer Prescaler
//WDTCSR = (1<<WDP2) | (1<<WDP0); // 0.5 seconds
//WDTCSR = (1<<WDP2) | (1<<WDP1); // 1.0 seconds
//WDTCSR = (1<<WDP2) | (1<<WDP1) | (1<<WDP0); // 2.0 seconds
//WDTCSR = (1<<WDP3); // 4.0 seconds
WDTCSR = (1<<WDP3) | (1<<WDP0); // 8.0 seconds
sei(); // Enable global interrupts
}
void PowerDownTXIntervall()
{
Serial.println(F("PowerDown..."));
Serial.flush();
int sleep_cycles = TX_INTERVAL / 8;
for (int i=0; i<=sleep_cycles+1; i++)
{
PowerDownUpdateMicros();
}
Serial.println(F("PowerUp..."));
}
void PowerDown()
{
ADCSRA &= ~(1<<ADEN); // ADC Disable for power saving
set_sleep_mode(SLEEP_MODE_PWR_DOWN); // Use the Power Down sleep mode
cli(); // Disable interrupts
WDTCSR |= (1<<WDIE); // WDTIE: Watchdog Timer Interrupt Enable
sleep_enable(); // Sets the Sleep Enable bit in the MCUCR Register (SE BIT)
sleep_bod_disable(); // Disable Brown-Out Detection
sei(); // Enable interrupts
sleep_mode(); // go to sleep and wait for interrupt...
sleep_disable(); // Clear SE bit
WDTCSR &= ~(1<<WDIE); // WDTIE: Watchdog Timer Interrupt Disable
sei(); // Enable interrupts
ADCSRA |= (1<<ADEN); // ADC Enable
}
void PowerDownUpdateMicros()
{
extern volatile unsigned long timer0_overflow_count;
PowerDown();
cli();
// LMIC uses micros() to keep track of the duty cycle, so
// hack timer0_overflow for a rude adjustment:
timer0_overflow_count+= 8 * 64 * clockCyclesPerMicrosecond();
sei();
}
void LoRaWANSetup()
{
Serial.println(F("LoRaWAN_Setup ..."));
// LMIC init
os_init();
// Reset the MAC state. Session and pending data transfers will be discarded.
LMIC_reset();
// Let LMIC compensate for +/- 1% clock error
LMIC_setClockError(MAX_CLOCK_ERROR * 1 / 100);
// Start job
LoRaWANDo_send(&sendjob);
}
void LoRaWANDo_send(osjob_t *j)
{
// Check if there is not a current TX/RX job running
if (LMIC.opmode & OP_TXRXPEND)
{
Serial.println(F("OP_TXRXPEND, not sending"));
}
else
{
LoRaWANGetData();
// Prepare upstream data transmission at the next possible time.
//LMIC_setDrTxpow(DR_SF7,14);
LMIC_setTxData2(1, LORA_DATA, sizeof(LORA_DATA), 0);
Serial.println(F("Packet queued"));
}
// Next TX is scheduled after TX_COMPLETE event.
}
void LoRaWANGetData()
{
LORA_DATA[0] = 0;
LORA_DATA[1] = 255;
LORA_DATA[2] = 255;
LORA_DATA[3] = 255;
}
void LoRaWANDo(void)
{
if (GO_DEEP_SLEEP == true)
{
PowerDownTXIntervall();
GO_DEEP_SLEEP = false;
}
else
{
os_runloop_once();
}
}