


Introduction
There are a number of similar boards with ESP32, OLED and LoRaWAN capability. Some time ago, I bought 3 of the original Heltec units; one I loaned to a another techy geek and one to my brother. The last has been loitering on my desk for a while and as a result of writing code for a more elaborate ESP32-based device, I decided to try out the excellent TinyGPS++ library.
Code
#include <dummy.h> //silence warnings from Arduino IDE
//combination of OTAA code and GPS for Heltec ESP32 OLED LoRa module
// NCB Fri 12th Jan 2018
// Link with LMiC library available here: https://github.com/matthijskooijman/arduino-lmic/
// GPS get_coords function adapted from here: https://github.com/brady-aiello/Seeeduino_LoRaWAN_for_hybrid_gateways
/* Decode coordinate payload for TTN console
function Bytes2Float32(bytes) {
var sign = (bytes & 0x80000000) ? -1 : 1;
var exponent = ((bytes >> 23) & 0xFF) - 127;
var significand = (bytes & ~(-1 << 23));
if (exponent == 128)
return sign * ((significand) ? Number.NaN : Number.POSITIVE_INFINITY);
if (exponent == -127) {
if (significand == 0) return sign * 0.0;
exponent = -126;
significand /= (1 << 22);
} else significand = (significand | (1 << 23)) / (1 << 23);
return sign * significand * Math.pow(2, exponent);
}
function Decoder(bytes, port) {
var lat = bytes[3] << 24 | bytes[2] << 16 | bytes[1] << 8 | bytes[0];
var lon = bytes[7] << 24 | bytes[6] << 16 | bytes[5] << 8 | bytes[4];
return{
latitude: Bytes2Float32(lat),
longitude: Bytes2Float32(lon)
};
}
*/
#include <HardwareSerial.h>
#include <TinyGPS++.h>
#include <lmic.h>
#include <hal/hal.h>
#include <SPI.h>
#include <U8x8lib.h>
#define BUILTIN_LED 25
// The TinyGPS++ object
TinyGPSPlus gps;
typedef union {
float f[2]; // Assigning fVal.f will also populate fVal.bytes;
unsigned char bytes[8]; // Both fVal.f and fVal.bytes share the same 4 bytes of memory.
} floatArr2Val;
floatArr2Val latlong;
float latitude;
float longitude;
char s[16]; // used to sprintf for OLED display
#define GPS_RX 22
#define GPS_TX 23
HardwareSerial GPSSerial(1);
// the OLED used
U8X8_SSD1306_128X64_NONAME_HW_I2C u8x8(/* clock=*/ 15, /* data=*/ 4, /* reset=*/ 16);
// This EUI must be in little-endian format, so least-significant-byte
// first. When copying an EUI from ttnctl output, this means to reverse
// the bytes. For TTN issued EUIs the last bytes should be 0xD5, 0xB3, 0x70.
static const u1_t PROGMEM APPEUI[8] = { 0x00, 0x00, 0x00, 0x00, 0x00, 0xD5, 0xB3, 0x70 };
void os_getArtEui (u1_t* buf) {
memcpy_P(buf, APPEUI, 8);
}
// This should also be in little endian format, see above.
static const u1_t PROGMEM DEVEUI[8] = { 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00 };
void os_getDevEui (u1_t* buf) {
memcpy_P(buf, DEVEUI, 8);
}
// This key should be in big endian format (or, since it is not really a
// number but a block of memory, endianness does not really apply). In
// practice, a key taken from ttnctl can be copied as-is.
//
static const u1_t PROGMEM APPKEY[16] = { 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00 };
void os_getDevKey (u1_t* buf) {
memcpy_P(buf, APPKEY, 16);
}
static osjob_t sendjob;
// Schedule TX every this many seconds (might become longer due to duty
// cycle limitations).
const unsigned TX_INTERVAL = 30;
// Pin mapping
const lmic_pinmap lmic_pins = {
.nss = 18,
.rxtx = LMIC_UNUSED_PIN,
.rst = 14,
.dio = {26, 33, 32},
};
void get_coords () {
while (GPSSerial.available())
gps.encode(GPSSerial.read());
latitude = gps.location.lat();
longitude = gps.location.lng();
// Only update if location is valid and has changed
if ((latitude && longitude) && latitude != latlong.f[0]
&& longitude != latlong.f[1]) {
latlong.f[0] = latitude;
latlong.f[1] = longitude;
for (int i = 0; i < 8; i++)
Serial.print(latlong.bytes[i], HEX);
Serial.println();
}
u8x8.setCursor(0, 2);
u8x8.print("Lat: ");
u8x8.setCursor(5, 2);
sprintf(s, "%f", latitude);
u8x8.print(s);
u8x8.setCursor(0, 3);
u8x8.print("Lng: ");
u8x8.setCursor(5, 3);
sprintf(s, "%f", longitude);
u8x8.print(s);
}
void onEvent (ev_t ev) {
switch (ev) {
case EV_SCAN_TIMEOUT:
Serial.println(F("EV_SCAN_TIMEOUT"));
u8x8.drawString(0, 7, "EV_SCAN_TIMEOUT");
break;
case EV_BEACON_FOUND:
Serial.println(F("EV_BEACON_FOUND"));
u8x8.drawString(0, 7, "EV_BEACON_FOUND");
break;
case EV_BEACON_MISSED:
Serial.println(F("EV_BEACON_MISSED"));
u8x8.drawString(0, 7, "EV_BEACON_MISSED");
break;
case EV_BEACON_TRACKED:
Serial.println(F("EV_BEACON_TRACKED"));
u8x8.drawString(0, 7, "EV_BEACON_TRACKED");
break;
case EV_JOINING:
Serial.println(F("EV_JOINING"));
u8x8.drawString(0, 7, "EV_JOINING ");
break;
case EV_JOINED:
Serial.println(F("EV_JOINED"));
u8x8.drawString(0, 7, "EV_JOINED ");
// Disable link check validation (automatically enabled
// during join, but not supported by TTN at this time).
LMIC_setLinkCheckMode(0);
break;
case EV_RFU1:
Serial.println(F("EV_RFU1"));
u8x8.drawString(0, 7, "EV_RFUI");
break;
case EV_JOIN_FAILED:
Serial.println(F("EV_JOIN_FAILED"));
u8x8.drawString(0, 7, "EV_JOIN_FAILED");
break;
case EV_REJOIN_FAILED:
Serial.println(F("EV_REJOIN_FAILED"));
u8x8.drawString(0, 7, "EV_REJOIN_FAILED");
//break;
break;
case EV_TXCOMPLETE:
Serial.println(F("EV_TXCOMPLETE (includes waiting for RX windows)"));
u8x8.drawString(0, 7, "EV_TXCOMPLETE");
digitalWrite(BUILTIN_LED, LOW);
if (LMIC.txrxFlags & TXRX_ACK) {
Serial.println(F("Received ack"));
u8x8.drawString(0, 7, "Received ACK");
}
if (LMIC.dataLen) {
Serial.println(F("Received "));
u8x8.drawString(0, 6, "RX ");
Serial.println(LMIC.dataLen);
u8x8.setCursor(4, 6);
u8x8.printf("%i bytes", LMIC.dataLen);
Serial.println(F(" bytes of payload"));
u8x8.setCursor(0, 7);
u8x8.printf("RSSI %d SNR %.1d", LMIC.rssi, LMIC.snr);
}
// Schedule next transmission
os_setTimedCallback(&sendjob, os_getTime() + sec2osticks(TX_INTERVAL), do_send);
break;
case EV_LOST_TSYNC:
Serial.println(F("EV_LOST_TSYNC"));
u8x8.drawString(0, 7, "EV_LOST_TSYNC");
break;
case EV_RESET:
Serial.println(F("EV_RESET"));
u8x8.drawString(0, 7, "EV_RESET");
break;
case EV_RXCOMPLETE:
// data received in ping slot
Serial.println(F("EV_RXCOMPLETE"));
u8x8.drawString(0, 7, "EV_RXCOMPLETE");
break;
case EV_LINK_DEAD:
Serial.println(F("EV_LINK_DEAD"));
u8x8.drawString(0, 7, "EV_LINK_DEAD");
break;
case EV_LINK_ALIVE:
Serial.println(F("EV_LINK_ALIVE"));
u8x8.drawString(0, 7, "EV_LINK_ALIVE");
break;
default:
Serial.println(F("Unknown event"));
u8x8.setCursor(0, 7);
u8x8.printf("UNKNOWN EVENT %d", ev);
break;
}
}
void do_send(osjob_t* j) {
// Check if there is not a current TX/RX job running
if (LMIC.opmode & OP_TXRXPEND) {
Serial.println(F("OP_TXRXPEND, not sending"));
u8x8.drawString(0, 7, "OP_TXRXPEND, not sent");
} else {
// Prepare upstream data transmission at the next possible time.
get_coords();
//LMIC_setTxData2(1, (uint8_t*) coords, sizeof(coords), 0);
LMIC_setTxData2(1, latlong.bytes, 8, 0);
Serial.println(F("Packet queued"));
u8x8.drawString(0, 7, "PACKET QUEUED");
digitalWrite(BUILTIN_LED, HIGH);
}
// Next TX is scheduled after TX_COMPLETE event.
}
void setup() {
Serial.begin(115200);
GPSSerial.begin(9600, SERIAL_8N1, GPS_RX, GPS_TX);
GPSSerial.setTimeout(2);
u8x8.begin();
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.drawString(0, 1, "Remon WebLoRa");
SPI.begin(5, 19, 27);
// LMIC init
os_init();
// Reset the MAC state. Session and pending data transfers will be discarded.
LMIC_reset();
// Start job (sending automatically starts OTAA too)
do_send(&sendjob);
pinMode(BUILTIN_LED, OUTPUT);
digitalWrite(BUILTIN_LED, LOW);
}
void loop() {
os_runloop_once();
}
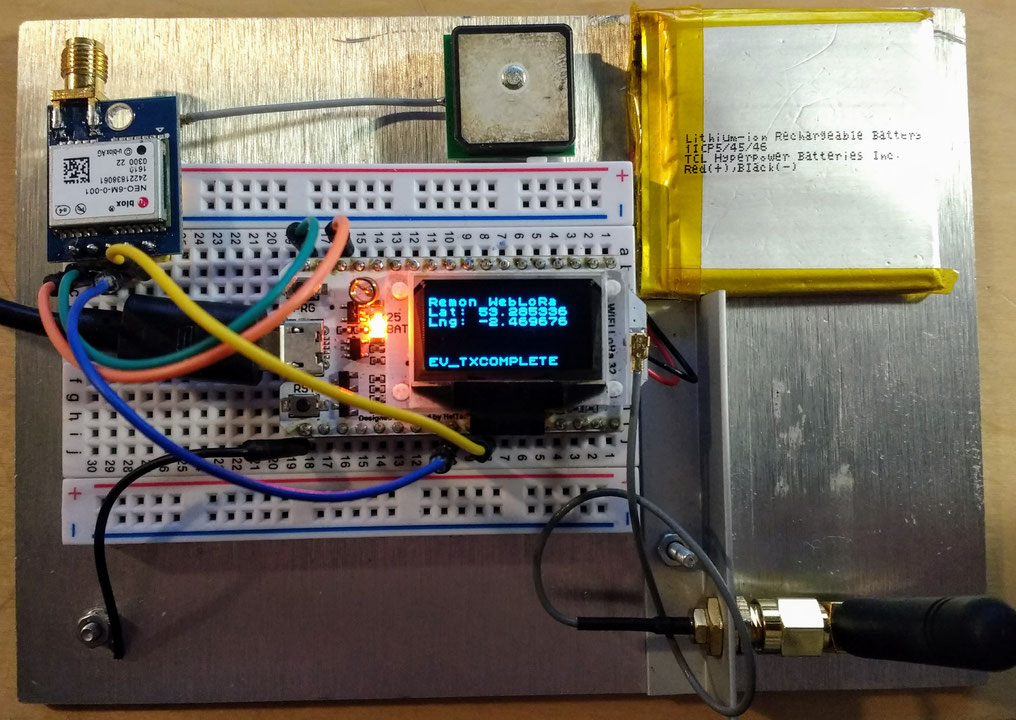
Putting it all together
There is not much required for wiring - I added the GPS TXD (from GPS) to pin 22 and RXD to pin 23.
I use the White LED on the Heltec board to indicate packet transmit.
I Google'd a lot of pages to find clean and simple methods to pack and decode GPS coordinates and found just what I needed in a Seeeduino project found here: https://github.com/brady-aiello/Seeeduino_LoRaWAN_for_hybrid_gateways
The GPS Latitude and Longitude are packed into 8 bytes and the JS decoder is included at the top of the Arduino Sketch - this code should be added to your TTN application payload format decoder dialog.