Hey @all 
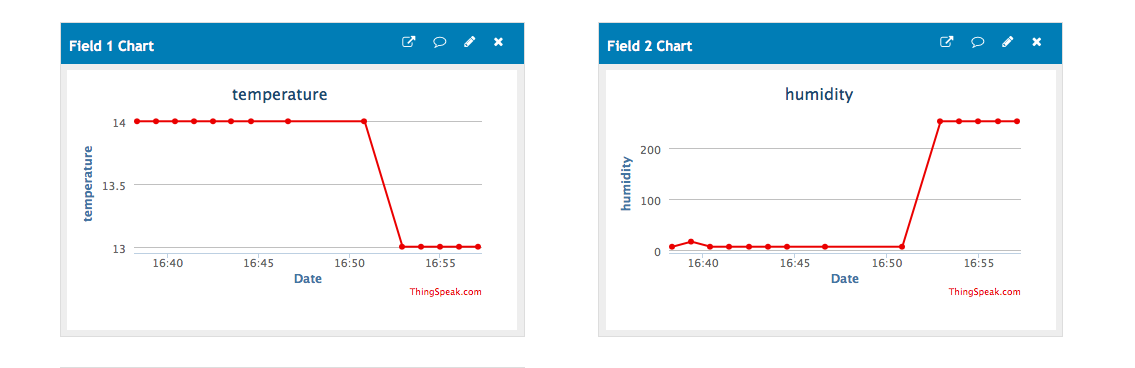
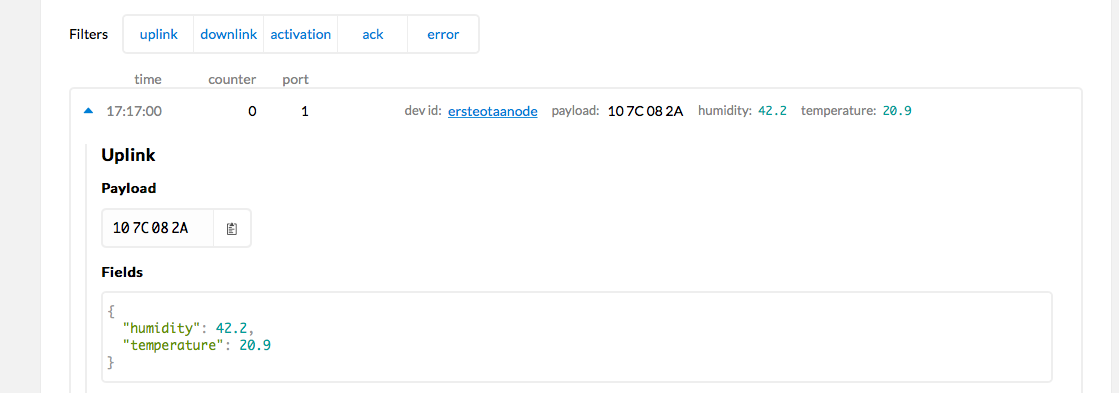
Now i am able to send the Temp and Humidity to TTN and see the payload and the Values but when i test it to send to my ThingSpeak Account then the Values are not correct because the payload must be in a ThingSpeak Format. Maybe anybody know how i format i correct !?
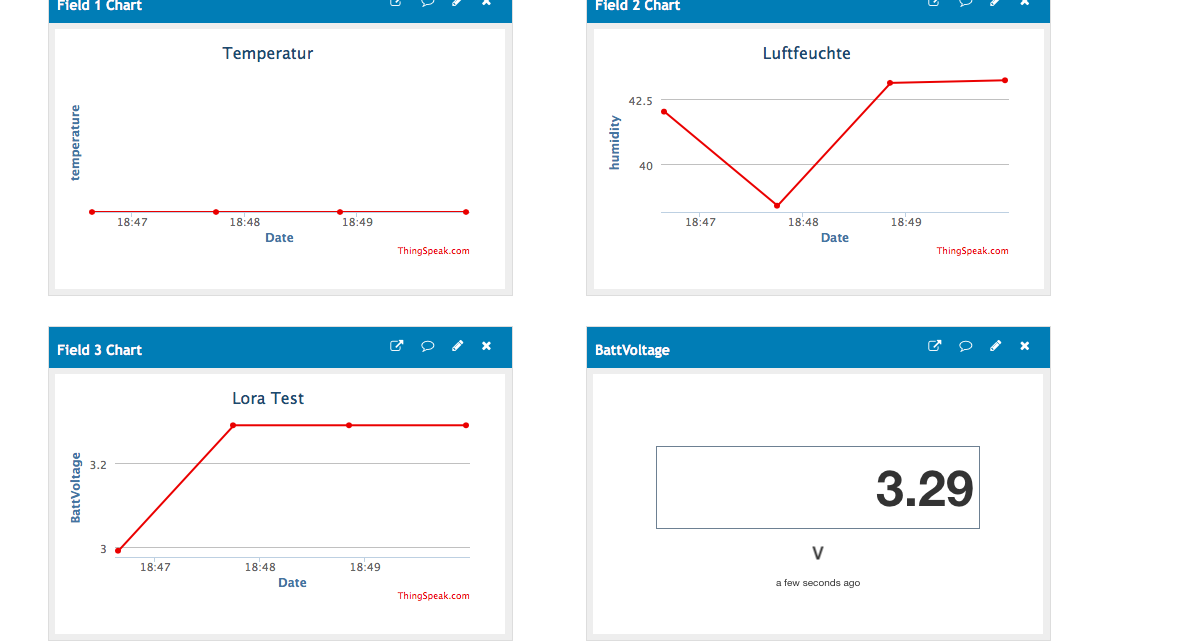
I only want Sensor Nodes with 3 Fields ( Temp / Humidity / BattVoltage ).
This is the Arduino Code is use:
* Copyright (c) 2015 Thomas Telkamp and Matthijs Kooijman
* Copyright (c) 2018 Terry Moore, MCCI
*
* Permission is hereby granted, free of charge, to anyone
* obtaining a copy of this document and accompanying files,
* to do whatever they want with them without any restriction,
* including, but not limited to, copying, modification and redistribution.
* NO WARRANTY OF ANY KIND IS PROVIDED.
*
* This example sends a valid LoRaWAN packet with payload "Hello,
* world!", using frequency and encryption settings matching those of
* the The Things Network.
*
* This uses OTAA (Over-the-air activation), where where a DevEUI and
* application key is configured, which are used in an over-the-air
* activation procedure where a DevAddr and session keys are
* assigned/generated for use with all further communication.
*
* Note: LoRaWAN per sub-band duty-cycle limitation is enforced (1% in
* g1, 0.1% in g2), but not the TTN fair usage policy (which is probably
* violated by this sketch when left running for longer)!
* To use this sketch, first register your application and device with
* the things network, to set or generate an AppEUI, DevEUI and AppKey.
* Multiple devices can use the same AppEUI, but each device has its own
* DevEUI and AppKey.
*
* Do not forget to define the radio type correctly in config.h.
*
*******************************************************************************/
#include <lmic.h>
#include <hal/hal.h>
#include <SPI.h>
#include <DHT.h>
#include <DHT_U.h>
#include <Adafruit_Sensor.h>
//
// For normal use, we require that you edit the sketch to replace FILLMEIN
// with values assigned by the TTN console. However, for regression tests,
// we want to be able to compile these scripts. The regression tests define
// COMPILE_REGRESSION_TEST, and in that case we define FILLMEIN to a non-
// working but innocuous value.
//
#ifdef COMPILE_REGRESSION_TEST
# define FILLMEIN 0
#else
# warning "You must replace the values marked FILLMEIN with real values from the TTN control panel!"
# define FILLMEIN (#dont edit this, edit the lines that use FILLMEIN)
#endif
// This EUI must be in little-endian format, so least-significant-byte
// first. When copying an EUI from ttnctl output, this means to reverse
// the bytes. For TTN issued EUIs the last bytes should be 0xD5, 0xB3,
// 0x70.
static const u1_t PROGMEM APPEUI[8]= { 0x19, 0x8A, 0x03, 0xD0, 0x7E, 0xD5, 0xB3, 0x70 };
void os_getArtEui (u1_t* buf) { memcpy_P(buf, APPEUI, 8);}
// This should also be in little endian format, see above.
static const u1_t PROGMEM DEVEUI[8]= { 0x0E, 0xBF, 0x84, 0x8B, 0x6D, 0x77, 0xFF, 0x22 };
void os_getDevEui (u1_t* buf) { memcpy_P(buf, DEVEUI, 8);}
// This key should be in big endian format (or, since it is not really a
// number but a block of memory, endianness does not really apply). In
// practice, a key taken from ttnctl can be copied as-is.
static const u1_t PROGMEM APPKEY[16]= { 0x0F, 0x32, 0x61, 0x45, 0x77, 0xC5, 0x24, 0x55, 0x0F, 0xDD, 0x3A, 0x78, 0xA5, 0x12, 0x0F, 0x2C };
void os_getDevKey (u1_t* buf) { memcpy_P(buf, APPKEY, 16);}
static uint8_t btn_activated[1] = { 0x01};
static osjob_t sendjob;
// Schedule TX every this many seconds (might become longer due to duty
// cycle limitations).
const unsigned TX_INTERVAL = 60;
// Pin mapping
const lmic_pinmap lmic_pins = {
.nss = 10,
.rxtx = LMIC_UNUSED_PIN,
.rst = 5,
.dio = {2, 3, LMIC_UNUSED_PIN},
};
//------ Added ----------------
#define LED_YELLOW 8
#define LED_GREEN 6
#define DHT_PIN 7
#define BTN_PIN 9
// DHT11 or DHT22
#define DHTTYPE DHT22
// Initialize dht
DHT dht(DHT_PIN, DHTTYPE);
int buttonState = 0; // current state of the button
int lastButtonState = 0; // previous state of the button
//-----------------------------
void onEvent (ev_t ev) {
Serial.print(os_getTime());
Serial.print(": ");
switch(ev) {
case EV_SCAN_TIMEOUT:
Serial.println(F("EV_SCAN_TIMEOUT"));
break;
case EV_BEACON_FOUND:
Serial.println(F("EV_BEACON_FOUND"));
break;
case EV_BEACON_MISSED:
Serial.println(F("EV_BEACON_MISSED"));
break;
case EV_BEACON_TRACKED:
Serial.println(F("EV_BEACON_TRACKED"));
break;
case EV_JOINING:
Serial.println(F("EV_JOINING"));
break;
case EV_JOINED:
Serial.println(F("EV_JOINED"));
{
u4_t netid = 0;
devaddr_t devaddr = 0;
u1_t nwkKey[16];
u1_t artKey[16];
LMIC_getSessionKeys(&netid, &devaddr, nwkKey, artKey);
Serial.print("netid: ");
Serial.println(netid, DEC);
Serial.print("devaddr: ");
Serial.println(devaddr, HEX);
Serial.print("artKey: ");
for (int i=0; i<sizeof(artKey); ++i) {
Serial.print(artKey[i], HEX);
}
Serial.println("");
Serial.print("nwkKey: ");
for (int i=0; i<sizeof(nwkKey); ++i) {
Serial.print(nwkKey[i], HEX);
}
Serial.println("");
}
// Disable link check validation (automatically enabled
// during join, but because slow data rates change max TX
// size, we don't use it in this example.
LMIC_setLinkCheckMode(0);
break;
/*
|| This event is defined but not used in the code. No
|| point in wasting codespace on it.
||
|| case EV_RFU1:
|| Serial.println(F("EV_RFU1"));
|| break;
*/
case EV_JOIN_FAILED:
Serial.println(F("EV_JOIN_FAILED"));
break;
case EV_REJOIN_FAILED:
Serial.println(F("EV_REJOIN_FAILED"));
break;
case EV_TXCOMPLETE:
Serial.println(F("EV_TXCOMPLETE (includes waiting for RX windows)"));
if (LMIC.txrxFlags & TXRX_ACK)
Serial.println(F("Received ack"));
if (LMIC.dataLen) {
Serial.print(F("Received "));
Serial.print(LMIC.dataLen);
Serial.println(F(" bytes of payload"));
//------ Added ----------------
if (LMIC.dataLen == 1) {
uint8_t result = LMIC.frame[LMIC.dataBeg + 0];
if (result == 0) {
Serial.println("RESULT 0");
digitalWrite(LED_YELLOW, LOW);
digitalWrite(LED_GREEN, LOW);
}
if (result == 1) {
Serial.println("RESULT 1");
digitalWrite(LED_YELLOW, HIGH);
digitalWrite(LED_GREEN, LOW);
}
if (result == 2) {
Serial.println("RESULT 2");
digitalWrite(LED_YELLOW, LOW);
digitalWrite(LED_GREEN, HIGH);
}
if (result == 3) {
Serial.println("RESULT 3");
digitalWrite(LED_YELLOW, HIGH);
digitalWrite(LED_GREEN, HIGH);
}
}
Serial.println();
//-----------------------------
}
// Schedule next transmission
os_setTimedCallback(&sendjob, os_getTime()+sec2osticks(TX_INTERVAL), do_send);
break;
case EV_LOST_TSYNC:
Serial.println(F("EV_LOST_TSYNC"));
break;
case EV_RESET:
Serial.println(F("EV_RESET"));
break;
case EV_RXCOMPLETE:
// data received in ping slot
Serial.println(F("EV_RXCOMPLETE"));
break;
case EV_LINK_DEAD:
Serial.println(F("EV_LINK_DEAD"));
break;
case EV_LINK_ALIVE:
Serial.println(F("EV_LINK_ALIVE"));
break;
/*
|| This event is defined but not used in the code. No
|| point in wasting codespace on it.
||
|| case EV_SCAN_FOUND:
|| Serial.println(F("EV_SCAN_FOUND"));
|| break;
*/
case EV_TXSTART:
Serial.println(F("EV_TXSTART"));
break;
default:
Serial.print(F("Unknown event: "));
Serial.println((unsigned) ev);
break;
}
}
void do_send(osjob_t* j){
// Check if there is not a current TX/RX job running
if (LMIC.opmode & OP_TXRXPEND) {
Serial.println(F("OP_TXRXPEND, not sending"));
} else {
uint32_t humidity = dht.readHumidity(false) * 100;
uint32_t temperature = dht.readTemperature(false) * 100;
Serial.println("Humidity: " + String(humidity));
Serial.println("Temperature: " + String(temperature));
byte payload[4];
payload[0] = highByte(humidity);
payload[1] = lowByte(humidity);
payload[2] = highByte(temperature);
payload[3] = lowByte(temperature);
//Prepare upstream data transmission at the next possible time.
LMIC_setTxData2(1, payload, sizeof(payload), 0);
Serial.println(F("Packet queued"));
}
// Next TX is scheduled after TX_COMPLETE event.
}
void setup() {
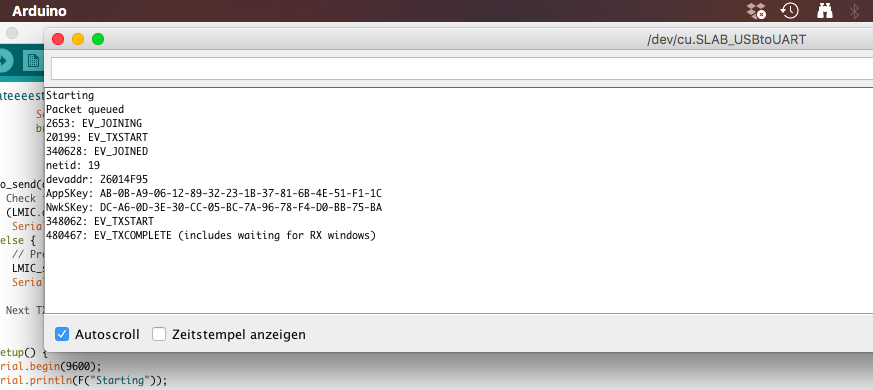
Serial.begin(9600);
Serial.println(F("Starting"));
//------ Added ----------------
pinMode(LED_YELLOW, OUTPUT);
pinMode(LED_GREEN, OUTPUT);
pinMode(BTN_PIN, INPUT);
digitalWrite(BTN_PIN, LOW);
dht.begin();
//-----------------------------
#ifdef VCC_ENABLE
// For Pinoccio Scout boards
pinMode(VCC_ENABLE, OUTPUT);
digitalWrite(VCC_ENABLE, HIGH);
delay(1000);
#endif
// LMIC init
os_init();
// Reset the MAC state. Session and pending data transfers will be discarded.
LMIC_reset();
// Use with Arduino Pro Mini ATmega328P 3.3V 8 MHz
// Let LMIC compensate for +/- 1% clock error
LMIC_setClockError(MAX_CLOCK_ERROR * 1 / 100);
// Start job (sending automatically starts OTAA too)
do_send(&sendjob);
}
void loop() {
//------ Added ----------------
// read the state of the button value:
buttonState = digitalRead(BTN_PIN);
// compare the buttonState to its previous state
if (buttonState != lastButtonState) {
if (buttonState == HIGH) {
// if the current state is HIGH then the button went from off to on:
LMIC_setTxData2(1, btn_activated, sizeof(btn_activated), 0);
Serial.println(F("Button On"));
} else {
// if the current state is LOW then the button went from on to off:
Serial.println(F("Button Off"));
}
// Delay a little bit to avoid bouncing
delay(50);
}
// save the current state as the last state, for next time through the loop
lastButtonState = buttonState;
//-----------------------------
os_runloop_once();
}
and the payload decoder in TTN is this:
if(bytes.length == 1) {
if(bytes[0] == 1) {
return {
'button': 'activated'
}
} else {
return {
'error': 'button action unknown'
}
}
} else if(bytes.length == 4) {
var humidity = (bytes[0]<<8) | bytes[1];
var temperature = (bytes[2]<<8) | bytes[3];
return {
'humidity': humidity/ 100,
'temperature': temperature/100
}
} else {
return {
'error': 'payload unknown'
}
}
}
and thats the Thing Speak (right) decoder format :
function Decoder(b, port) {
var var1 = b[0];
var var2 = b[1];
var var3 = b[2];
var var4 = b[3];
var var5 = (b[4] << 8) | b[5];
var var6 = (b[6] << 8) | b[7];
var var7 = (b[8] << 8) | b[9];
var var8 = (b[10] << 8) | b[11];
var lat = (b[12] | b[13]<<8 | b[14]<<16 | (b[14] & 0x80 ? 0xFF<<24 : 0)) / 10000;
var lon = (b[15] | b[16]<<8 | b[17]<<16 | (b[17] & 0x80 ? 0xFF<<24 : 0)) / 10000;
var height = b[18];
var myStatus = b[19];
return {
field1: var1,
field2: var2,
field3: var3,
field4: var4,
field5: var5,
field6: var6,
field7: var7,
field8: var8,
latitude: lat,
longitude: lon,
elevation: height
}
}
But i don´t know how to change the payload format in the Arduino code to match the decoder above ?!
thank you all for any help and Info
regards from Germany