Just wondering if someone here uses TBOL100 Browan Object Locator devices.
I try one to track a moving object, and while TBOL100 does what I expect it to do - start sending locations every 2 minutes, when moves - it does always send GNSS fix that has been 2-3-4 minutes ago. So while roundtrip time from the sensor via my own gateway, then through TTN to HTTP hook of my service, then to the app is 1-2 seconds, position reflected in the app is 2-4 minutes from the past.
This kind of defies the purpose of real-time object tracking, and the end device is the culprit.
I wonder whether this is by design, or there is some parameters in TBOL100 I can tune? This doesn’t seem logical, other sensors do send realtime fixes but this is the lightest one and hence preferable. Firmware upgrade?
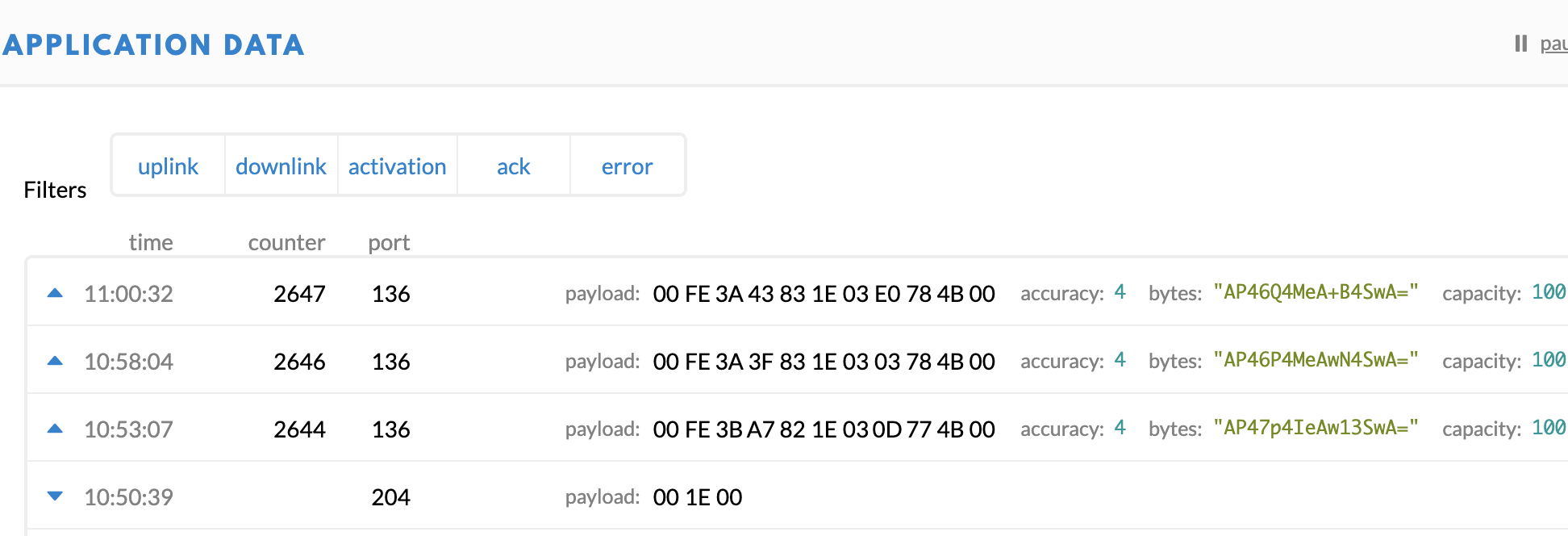
Well, I did send 00 1E 00 on port 204, as described in manual, but it doesn’t seem to have any effect on the device.
Now it still sends every 2 minutes and 30 seconds.
I believe the commands have to be sent as confirmed downlink messages. I’ve seen a TBMS100 respond with a configuration settings uplink message each time a configuration command was sent. Do you also see that?
If it isn’t working for you, I think you should contact the manufacturer.
I tried with confirmed too, same effect. And yes I’ve written to BroWAN, no response yet…
The problem is not in the frequency of the updates as such, the problem is that each update comes with a fix (real position) that has been 2-4 minutes ago - as seen visually and on another trackers.
I wonder if there are any other similar devices, LoRaWAN GNSS and <50 g weight… that one fits my case quite good, be it not for real-time fixes…
Got response from Browan, even had a call with them. Seems like the sensor I bought was older version that just didn’t have all these features. Ordered two new tabs, works like a charm.
i used your uplink payload formatter on TTN for the Browan Object Locator but i am not getting correct location information.
I am using the Browan Object Locator.
I don’t understand where is the error in the code? Looking at the manual I believe the code is correct.